I/O™ 推杆的故障排除方法
LINAK® 了解运行时间的重要性,因此必须尽快修复或更换不工作的推杆。

即使 LINAK(力纳克)推杆使用简便,也可能出现问题。
排除推杆故障不应复杂,这就是 LINAK(力纳克)为您提供解决问题可行方案的原因。以下指南解释了最常见的问题根源,以及这些问题的解决方法。
如果您的问题没有在下面部分得到解答,请联系 您当地的 LINAK 办事处 寻求更多技术支持。
可视检查 - LED 状态指示灯
可为推杆配备一个透明连接器和一个 LED 灯。如此可通过简便的目检进行快速诊断。
LED 指示灯可显示不同的颜色,具体取决于推杆状况:
·
绿色 : 正常
·
红色:不工作(内部错误)
·
黄色:不工作(外部错误)
·
蓝色 : 蓝牙连接
LED 灯可用于快速确定推杆是否运行正常,或是否存在需要更加仔细检查的故障。
除了提供当前状态的可视指示器之外,它还用于确定通过( Actuator Connect™ )的 Bluetooth® 连接哪个推杆。
如果 LED 灯未亮起,请尝试检查电源线和电源连接是否正确或损坏。
I/O™ 基本版推杆 没有 LED 灯。
错误代码直接发送至您的控制器(PLC)
对于不能停止的应用,LINAK(力纳克)提供错误代码作为数字输出以便排除故障。
可从数字输出端上读取多个错误代码。
在 10 秒的时间内,推杆根据错误类型向控制器(PLC)发送脉冲,遵照下表所列的模式。
如果您能轻松排除系统故障并找到解决问题的解决方法,即可节省时间,否则可能引起不必要的更换。
LED 灯
脉冲数
(每 10 秒)
错误
补救措施
•
0
无错误
当推杆正常工作时,LED 灯为绿色,信号一直为低电平。如果 LED 灯颜色或脉冲数发生变化,可能表明系统出现故障。
•
1
电流超载
(外部错误)
推杆因电流过载所致而停止。请清除可能的障碍物,然后朝着障碍物的相反方向运行。
•
2
硬件
(内部错误)
推杆检测到内部硬件错误。尝试为系统重新供电或对推杆进行初始化。如果无法排除硬件故障,请联系您当地的 LINAK(力纳克)办事处寻求更多帮助。
•
3
温度
(外部错误)
推杆检测到高温并已关闭。请降低环境温度或在规定范围内调整占空比。同时确保施加的负载与推杆的最大额定负载相匹配。
•
4
过压
(外部错误)
供电电压过高,导致推杆停止。请检查电源,确保其与额定电压相匹配。
•
5
欠压
(外部故障)
供电电压过低,导致推杆停止。请检查电源,确保其与推杆的额定电压和典型耗用电流相匹配。此外,还应确保电缆足够粗,以免电压下降。
•
6
模拟输入值超出范围
(外部错误)
驱动推杆所用的模拟输入值(伺服驱动或比例)超出范围。请确保所选的信号类型在规定的范围内。
•
7
位置未变化
(内部错误)
内部霍尔传感器在超过 1.5 秒的时间内未识别到脉冲。这可能表明电机正在失速。尝试为系统重新供电或对推杆进行初始化。如果无法排除错误,请联系您当地的 LINAK(力纳克)办事处寻求更多帮助。
•
8
运行信号被否决
(外部错误)
为避免意外运动,重新通电后推杆忽略了运行信号。请消除运行信号并重试。
•
9
位置无法进行初始化
(内部错误)
电动推杆检测到内部位置无法进行初始化的错误。再次尝试为系统重新供电或对推杆进行初始化。如果无法排除初始化故障,请联系您当地的 LINAK 办事处寻求进一步的帮助。
•
10
同步启动
(外部错误)
启动时,同步系统检测到推杆数量不正确。检查 Actuator Connect(每个推杆的配置必须相同)中的配置,或检查同步运动所用的紫色和白色导线的接线。
•
11
同步运行
(内部错误)
如在不关闭电源的情况下断开其中一个同步运动的推杆,系统会显示 "推杆数量错误 "。请确保同步推杆的数量与配置相匹配。
•
12
BLDC 电机(
(内部错误)
推杆检测到无刷直流电机控制器出错。尝试为系统重新供电或对推杆进行初始化。如果无法排除故障,请联系您当地的 LINAK 办事处寻求进一步的帮助。
•
13
限位开关
(内部故障)
限位开关工作异常。示例:两个限位开关同时被启动超过 100 毫秒。使电动推杆完全伸出和缩回来执行初始化过程。
•
14
同步通信
(内部错误)
内部并行通信出现错误。500 毫秒内出现 5 个以上通信错误。请检查接线并重新为整个装置供电。
•
15
并行配置停止
(外部错误)
一个或多个电动推杆无法响应命令并停止。主控制器向网络中的其他电动推杆发出 " 停止 " 命令。发送 " 清除错误 " 命令以清除错误。如果错误仍然存在,请检查您的应用和接线,并重新为整个装置供电。
•
25
(持续)
位置丢失
(内部错误)
推杆失去位置跟踪。请完全向内运行推杆,然后向外穿过 35-70 mm 区域,以对推杆进行初始化。
更多错误代码
如何对推杆进行初始化
通常建议,定期对推杆进行初始化,确保定位准确。此过程还可用于解决一些简单故障,这些简单故障有时可能导致报错。
若要对 I/O 推杆进行初始化,请先将推杆运动到完全缩回位置。然后使推杆向外穿过零点初始化区域(至少过去 70 mm),最好以固定速度平稳运动。
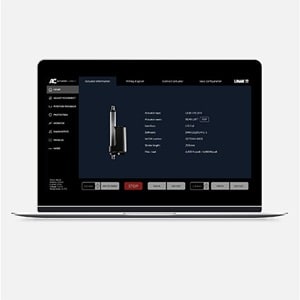
连接到 PC
通过 Bluetooth® 或电缆将您的推杆接到 LINAK Actuator Connect 配置器上,查看推杆的当前状态和潜在问题的解决方法。
如果推杆报告故障,可以找出导致停止的具体故障。可用的状态和诊断数据有助您减少停机时间。
通过错误记录,您可了解推杆发生的最后五个错误,并可了解连续出现的错误次数。这会记录下来,并附有时间,可将该时间与推杆的总运行时间进行比较。
这些数据可用于识别模式,并让您了解反复出现的错误源。
LINAK ®带有 IC Integrated Controller™(IC 集成控制器)的推杆非常灵活,可以满足客户的特殊要求和需要。使用简便的 Actuator Connect™配置器设置您的推杆。
从这里下载免费版的最新 Actuator Connect 配置器。
同步故障排除
同步系统用于持续监控系统内所有推杆的状态。如果推杆失去位置跟踪,同步系统会进入恢复模式 并自行进行初始化 - 在这里,当施加运行信号(在两个方向的整个行程长度内)时,系统减速(50% 的设定速度)运行。
如果系统不能在恢复模式下运行,请继续执行故障排除过程:
- 检查推杆之间的电缆、电源和通讯信号
- 查看 LED 灯颜色,目检推杆找出导致系统停止的原因。
- 将每个 LED 指示的故障推杆连接到 Actuator Connect 配置器 上,并查看当前状态以了解系统停止的原因。
- 尝试使用 Actuator Connect 配置器对推杆进行手动初始化(前提是卸下推杆或在并行系统没有其他推杆的情况下允许运行)。
- 在初始化后,如果修复了内部或外部错误,推杆可以重新同步运行。
还有故障吗?请联系 您当地的 LINAK(力纳克)办事处。