运动调整
在您的应用中融入直线运动从未如此容易。
运动调整可通过各种控制选项、虚拟限值和可调速度为您提供充分的灵活性。这是 LINAK® I/O™ 接口的组成部分,并是添加至推杆的若干选项之一,如此可从智能直线运动中获益。
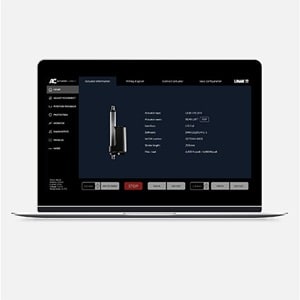
从下面可以了解 运动调整 功能。这些功能均可在我们支持的配置器 Actuator Connect™中配置。
LINAK ®带有 IC Integrated Controller™(IC 集成控制器)的推杆非常灵活,可以满足客户的特殊要求和需要。使用简便的 Actuator Connect™配置器设置您的推杆。
从这里下载免费版的最新 Actuator Connect 配置器。
控制和调整您的推杆
- 提供多种输入接线选项和速度设置
LINAK 根据您的偏好提供不同的推杆运动控制选项。您可为每个选项定制速度:
- 对于标准运行模式,您可从低电平切换中获益,并可使用两根电线的数字信号来触发所需方向的运动(例如,以 50% 的速度向内运动)。两个方向您可选择相同的速度 - 或为内外运动分别选择设置速度。
- 通过预定义位置最多可以选择两个目标位置。如果希望每次都运动到完全相同的位置,这是非常智能的。您可以使用预定义的位置,例如让控制面板触发移向目标位置的运动,即使使用不同的速度设置。
- 在脉冲运行模式下, 使用 1 根或 2 根电线来使电动推杆在脉冲下运行。在操作过程中,您可用脉冲来控制电动推杆,无需保持电线的运行信号。当由脉冲信号(如按钮)触发时,可使电动推杆向外 / 向内运行。
- 通过伺服驱动模式可以使用模拟输入信号来控制推杆的位置(0-10 V 或 4-20 mA)。如此可以根据输入信号来调整推杆的物理行程长度,从而使用您自己选择的信号来对推杆位置进行全面的控制。
- 使用比例模式可以根据模拟输入参数(0-10 V 或 4-20 mA)控制推杆的速度和方向。
通过虚拟限值来限制行程长度
- 在推杆到达物理端点止挡之前停止推杆
可以定义进出方向的虚拟限值。如果推杆收到运行信号,只能运动到行程的虚拟末端。如您使用推杆进行实物试验,这一点特别有用。对于偶尔需要调整行程长度的应用,它也很方便。
在推杆学习模式下,可以手动或自动设置虚拟限值:
- 手动模式 - 可以控制行程长度,以使推杆总是停在某一特定位置。例如,如果备有多个相同的推杆,但有时只需一个行程较短的推杆,可以使用这个推杆。为向外和 / 或向内运动方向分别设定一个数值。
- 学习模式 - 学习模式可使推杆识别新的端点止挡。它根据行程长度的预定义区域和电流限值来执行此操作,以触发新的端点止挡(如发生阻塞情况)。在有些情况下,考虑返回功能可能很重要 - 这能让您了解一个略微远离机械挡块的新端点止挡,从而可以延长推杆的使用寿命并进行更平稳的运动。